国際航空ロボット競技会

国際航空ロボット競技会(IARC )は、ジョージア工科大学のキャンパスで開催される大学ベースのロボット競技会で、現在はRoboNationが主催しています。1991年以来、産業界と政府の支援を受けた大学チームが自律飛行ロボットを投入し、これまでの飛行機械ではできなかったロボットの動作を必要とするミッションの実行に挑戦してきました。[ 1 ]「航空ロボット」という用語は、1990年にこの競技会の主催者であるロバート・マイケルソン氏が、新しい種類の小型で高度に知能化された飛行機械を表すために作りました。[ 2 ] [ 3 ] 競技会が続くにつれて、これらの航空ロボットは、空中でかろうじて自立飛行できる乗り物から、自立して飛行し、環境と相互作用できるオートマトンに成長しました。
このコンテストの目的は、最先端の航空ロボット技術を前進させるきっかけを提供することです。[ 4 ] 課題は進歩を生み出すことに向けられてきました。1991年から2009年にかけて、6つのミッションが提案されました。いずれも、当時は実証されていなかった完全に自律的なロボットの動作を伴うものでした。 [ 5 ] [ 6 ] 2013年10月には7番目のミッションが提案されました。これは、航空ロボットと複数の地上ロボットとの相互作用を伴う初めてのミッションでした。[ 7 ] 2016年、このコンテストとその主催者は、ジョージア州議会で上院決議の形で、世界で最も長く続いている航空ロボットコンテストとして認められました。[ 8 ]
歴史
最初のミッション
{kind=link}

金属製の円盤をアリーナの端から端まで移動させるという当初のミッションは、多くの人からほぼ不可能と思われていました。その後2年間、ジョージア工科大学のチームが初めて自律離着陸を披露すると、大学チームは作品の質を高めていきました。1995年には、スタンフォード大学のチームが円盤1枚を掴み、アリーナの端から端まで、完全自律飛行(半自動飛行)で移動させることに成功しました。[ 9 ] [ 10 ]
第二のミッション
競技ミッションは、有毒廃棄物投棄場の探索、ランダムな向きで部分的に埋められた有毒廃棄物ドラム缶の位置のマッピング、各ドラム缶の外側の危険物ラベルから各ドラム缶の中身の特定、そしてドラム缶のうち1つからサンプルの持ち帰りをチームに要求することで、より難しく抽象度の低いものとなった。[ 11 ] 1996年、マサチューセッツ工科大学とボストン大学のチームがドレイパー研究所の支援を受けて、5つの有毒廃棄物ドラム缶すべての位置を繰り返し正確にマッピングし、2つのドラム缶の中身を空中から正しく特定し、[ 12 ]ミッションの約75%を完了した小型の完全自律飛行ロボットを作成した。翌年、カーネギーメロン大学のチームが開発した航空ロボットがミッション全体を完了した。[ 10 ]
3番目のミッション

{kind=link}

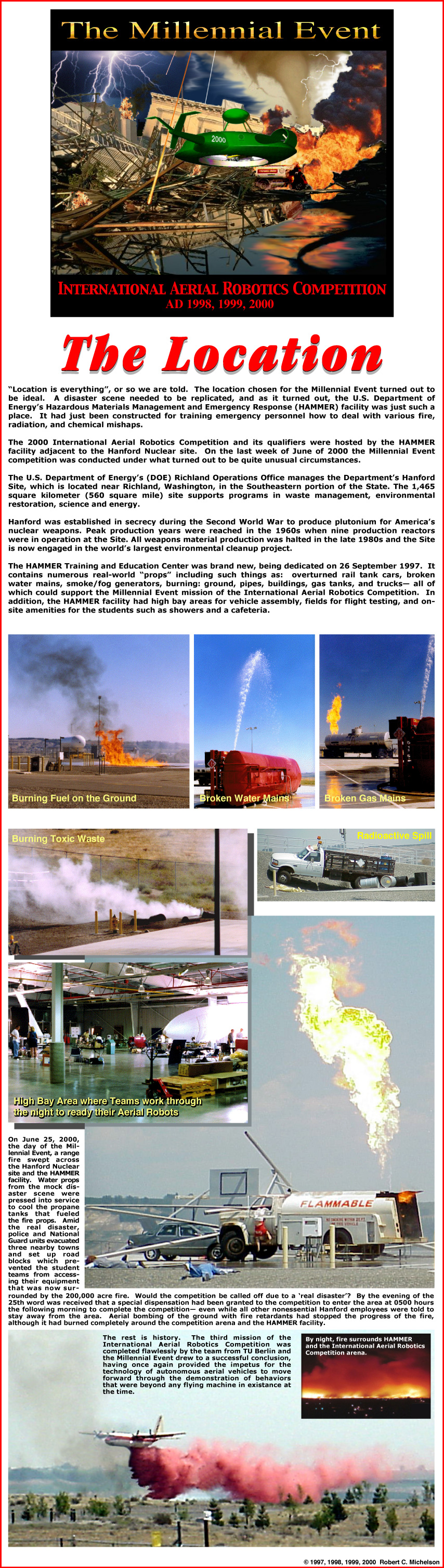
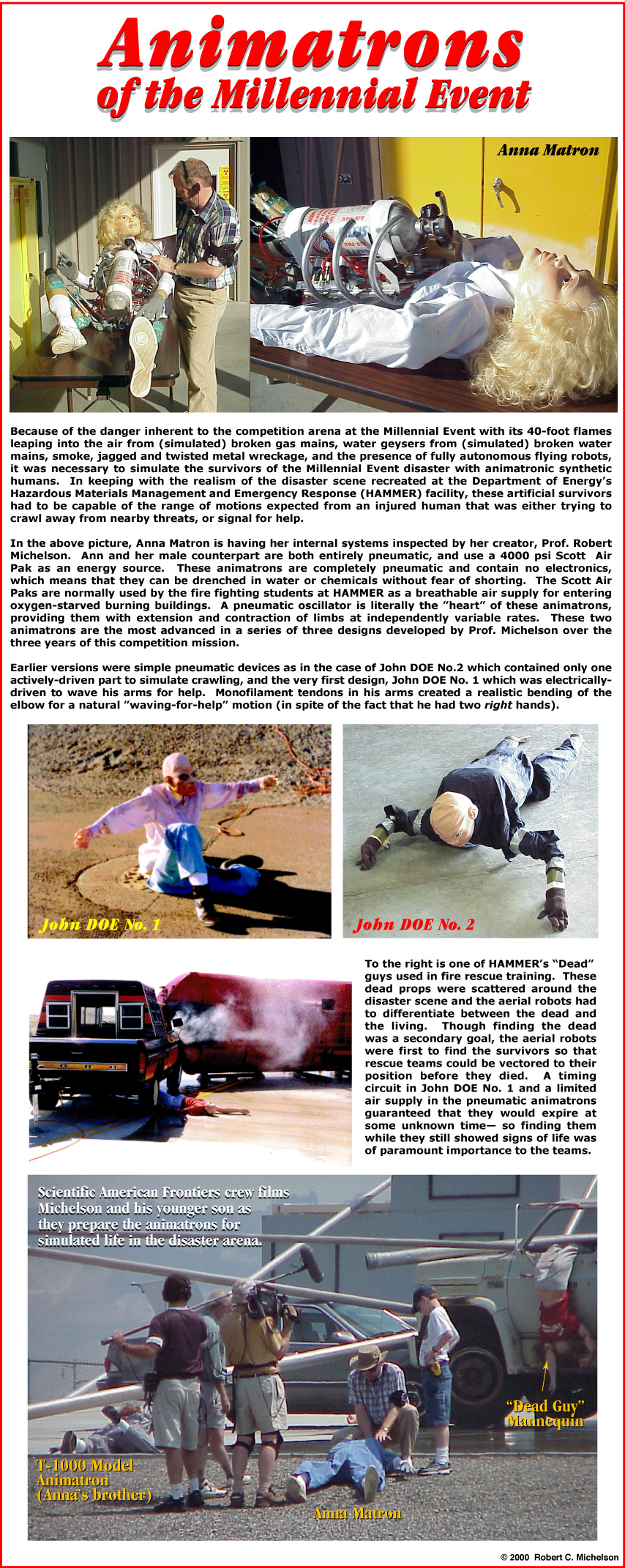
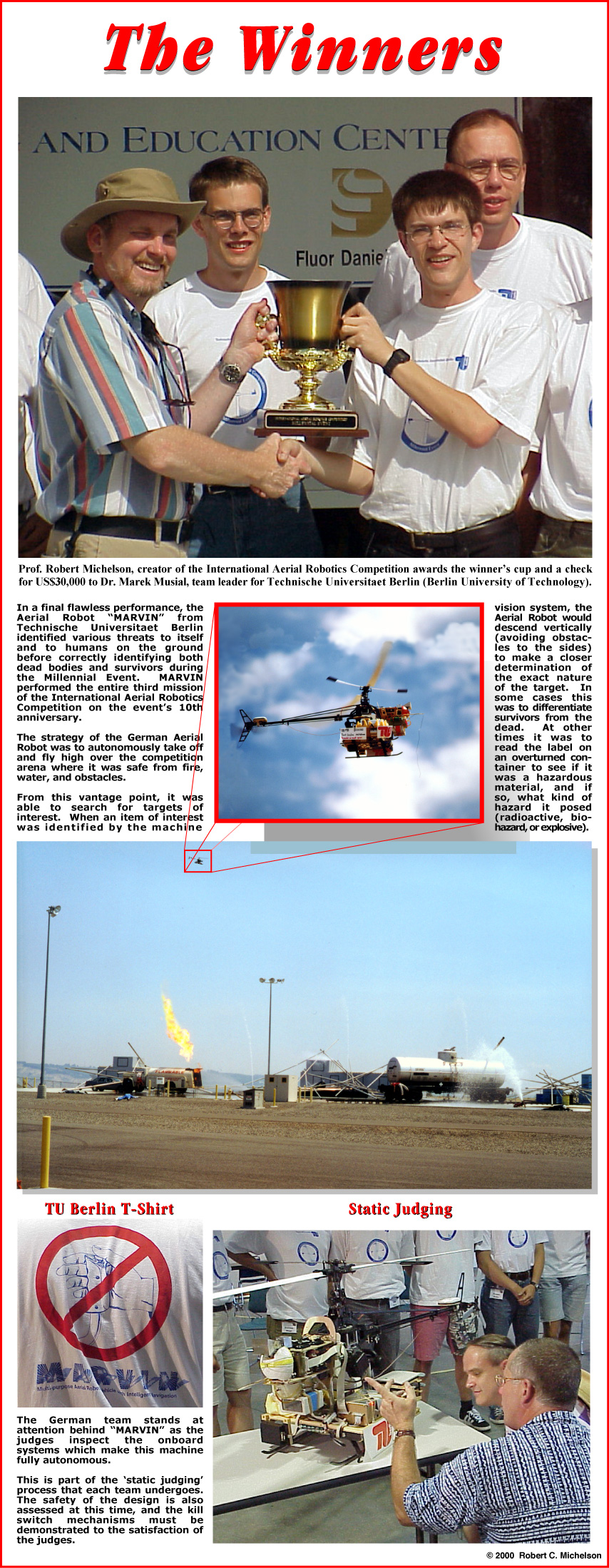
3回目のミッションは1998年に開始された。これは、完全自律型ロボットが離陸し、被災地に飛行して、火災、破損した水道管、有毒ガスの雲、瓦礫の中で捜索を行う捜索救助ミッションであった。[ 13 ]このシナリオは、米国エネルギー省の危険物管理および緊急対応(HAMMER)訓練施設で再現された。シナリオのリアリティを重視し、被災地から自力で脱出できない生存者をシミュレートするために、人間の俳優ではなくアニマトロンが使用された。[ 14 ]ドイツのベルリン工科大学の飛行ロボットは、すべての障害物を検知して回避し、地上の死者と生存者全員を識別し(動きに基づいて両者を区別)、生存者の写真とその位置を、救助を試みる最初の対応者に中継することができた。[ 15 ] このミッションは2000年に完了した。[ 16 ]
第4のミッション
第 4 のミッションは 2001 年に開始されました。このミッションには、同じ自律動作が要求される 3 つのシナリオが含まれていました。人質救出ミッションでは、海岸から 3 キロ離れた場所にいる潜水艦から航空ロボットを派遣して沿岸都市を見つけ、人質が拘束されている大使館を特定し、大使館の有効な開口部を見つけ、大使館に水陸両用攻撃を仕掛けて人質を解放する前に、大使館に侵入 (またはセンサー プローブ/潜水車両を送り込み)、人質の写真を 3 キロ離れた潜水艦まで中継する必要があります。[ 17 ]考古学チームがウイルスによって死亡した古代の霊廟の発見では、考古学チームが、重要だが未記録のタペストリーが内部に掛けられていると無線で連絡してきました。15 分以内に自律航空ロボットを派遣して霊廟を見つけ、侵入 (またはセンサー プローブ/潜水車両を送り込み)、霊廟とその内容物が破壊される前にタペストリーの写真を中継する必要があります。[ 17 ]原子炉施設で爆発が起きた場合、科学者は稼働中の原子炉建屋を見つけるために空中ロボットを送り込み、建屋に入り(またはセンサープローブや潜水艇を送り込み)、制御盤の写真を中継してメルトダウンが差し迫っているかどうかを判断しなければならない。[ 17 ]
3つのミッションはすべて、15分以内の侵入、位置特定、識別、進入、画像の中継という同じ要素を含んでいました。[ 18 ]このミッションは、米陸軍フォートベニング兵士戦闘研究所のマッケナMOUT(市街地軍事作戦)施設で実施されました。4回目のミッションは2008年に完了し、27チームが要求された航空ロボットの動作をそれぞれ実証しましたが、これらの動作を15分以内に実証することができませんでした。これは、審査員が時間を与えられれば避けられない偉業であり、したがってもはや大きな挑戦ではないと判断したためです。こうして4回目のミッションは終了し、8万ドルの賞金が分配され、5回目のミッションが開始されました。[ 19 ] [ 17 ]
第5ミッション
{kind=link}

第5ミッションは、第4ミッションの続きで、航空機が侵入した構造物の限られた内部空間を迅速に移動するために必要な、完全自律飛行ロボットの挙動を実証した。第4ミッションの原子炉複合施設の爆発シナリオが、第5ミッションの背景として使用された。第5ミッションでは、全自律飛行体が構造物に侵入し、廊下、小部屋、障害物、行き止まりを含むより複雑な内部空間を移動して、GPS航法援助の助けを借りずに指定されたターゲットを捜索し、構造物から少し離れた監視ステーションに画像を送信する必要があった。[ 20 ]屋内飛行問題に関する第1回シンポジウムは、 この2009年のIARCイベントと併せて開催された。
第六のミッション
第6ミッションは、第5ミッションのテーマである屋内自律飛行の延長として2010年に開始されましたが、2010年当時存在していたどの航空ロボットにも不可能な高度な行動が要求されました。このスパイミッションは、建物内の特定の部屋からフラッシュドライブを密かに盗み出し、盗難の発覚を避けるために同一のドライブを別の場所に保管するというものでした。2010年の屋内飛行に関するシンポジウムは、 20周年記念コンペティション期間中にプエルトリコ大学マヤグエス校で同時開催されました。 [ 21 ]
第七のミッション
{kind=link}

第 7 のミッションは 2014 年に開始され、2014 年当時存在していたどの航空ロボットでも不可能だったより高度な動作が要求されました。1 台の自律飛行ロボットが、20 m x 20 m (65.62 フィート x 65.62 フィート) のアリーナの指定された端の向こう側に、最大 10 台の自律地上ロボット ターゲットを 10 分以内に集めなければなりませんでした。アリーナにはSLAMマッピング用の壁も、 GPSもありませんでした。アリーナ内のナビゲーションには、オプティカル フローや光学オドメトリなどの技術が可能な解決策でした。 [ 22 ]障害物地上ロボットとの衝突により、実行はスコアなしで終了しました。自律飛行ロボットは、地上ロボットと次のように相互作用しました。飛行ロボットが地上ロボットの上部に触れると、地上ロボットは時計回りに 45 度回転します。飛行ロボットが地上ロボットの前に着地して前進をブロックすると、地上ロボットは方向転換します。アリーナから逃げ出した地上ロボットは、空中ロボットの総合得点に加算されるため、自律飛行ロボットは、指定された境界線以外の境界線を越える危険が差し迫っている地上ロボットを特定し、指定された境界線に向かって誘導する必要がありました。[ 23 ]浙江大学は、 12か国から52チームが参加したミッション7の総合優勝者となりました。 [ 24 ] [ 25 ] [ 26 ]
第8のミッション

2018年、第8ミッションが発表されました。ミッション8は、初めて電子機器を介さない人間と機械のインタラクションに焦点を当て、4機の航空ロボットが人間を補助して、人間単独では達成できないタスクの遂行を支援しました。ミッション8の要点は、人間の妨害を企てる敵対的な「セントリー航空ロボット」の存在下で、自律型航空ロボットの群れが人間と協力し、タスクを達成するというものでした。[ 27 ]
ミッション8の初開催年である2018年、アメリカ会場はジョージア州アトランタのジョージア工科大学のキャンパスで、アジア太平洋会場は中国北京の北京航空航天大学で行われた。翌年、ミッション8は中国昆明の北京航空航天大学雲南イノベーション研究所で3つのチームにより8分未満で成功裏に完了した。その中で、南京航空航天大学(NUAA)が最速完了時間でミッションを完了した。NUAAから10秒以内にミッションを完了したのは孫文大学であった。ハルビン研究所も残り12秒でミッションを完了し、NUAAが1万ドルの優勝賞金を獲得した。[ 28 ]
第9のミッション

2023年に第9ミッションは終了した。[ 29 ]ミッション9は、搭載コンピューティングのみを使用して3kmのルートで障害物や他の航空ロボットを回避しながら完全な自律飛行を行い、移動するプラットフォーム(海上状態3のボート)のマストにある重さ2kg(4.4ポンド)、長さ約1m(39インチ)の通信モジュールを交換し、9分以内に帰還することに焦点を当てていた。[ 30 ] 4つの異なる国から登録された12のチームが、COVID-19による渡航制限のため、それぞれの大学でミッションの実施を試みた。最高のパフォーマンスを発揮したのは、ノルウェー科学技術大学(NTNU)のチームだった。このチームは、ミッション9の公式ルールに記載されている必要な行動をすべて、数回の認証された実行で実証したが、最終的な採点実行で、以前の実行で正常に実証されていた機器の故障に見舞われた。しかし、最終的には総合的なパフォーマンスが評価され、チームが総合優勝を果たした。[ 31 ] [ 32 ]
第10のミッション
国際航空ロボット競技会のミッション10は、2025年の初めに発表されました。[ 33 ] このミッションは、人間がジェスチャーまたは音声コマンドのみを使用して(制御ステーションなし)小型自律航空機(重量1ポンドカテゴリー)の群れを方向付けることに重点が置かれています。群れは、10分以内に100メートルの地雷原を横断しようとする人間によって解放されます。[ 34 ]障害物回避と同時飛行調整 が可能な小型自律航空機の群れは、地雷原を通過する人間の安全な経路を計算して通信しながら、模擬対人地雷の位置をリアルタイムで検出してマッピングします。ミッション10の焦点は、検出技術(例:地中レーダー、磁気、ハイパースペクトルイメージング、または音響/地震技術)ではなく、自律航空調整、マッピング、通信、および速度です。模擬地雷は、事前に定義されたアクティブおよびパッシブ赤外線シグネチャによって検出可能です。第10回IARCミッションの会場は、米国アラバマ州ハンツビル近郊のUASおよび対UASセンターオブエクセレンステストレンジです。
参加者
IARCに参加する大学チームは、主にアメリカ合衆国と中華人民共和国から参加していますが、ドイツ、イギリス、スイス、ノルウェー、スペイン、カナダ、チリ、カタール、イラン、インドからも参加しています。チームの規模は数人から20人以上まで様々です。チームには学部生と大学院生が参加していますが、学部生または大学院生のみで構成されたチームもあります。産業界からの参加は認められていませんが、学生チームへの資金や機材提供は可能です。[ 35 ] [ 36 ]
航空ロボット

航空ロボットのデザインは、固定翼飛行機から従来のヘリコプター[ 37 ] 、ダクトファン、飛行船[ 38 ]、さらには奇妙なハイブリッド作品まで多岐にわたります[ 39 ] 。この競技は完全な自律動作に焦点を当てているため、航空機自体はそれほど重要ではありません。
航空ロボットは無人かつ自律的でなければならず、競技場の半構造化環境を感知する能力に基づいて競争しなければならない。ロボットは知能を備えていたり、事前にプログラムされていたりする場合もあるが、ほとんどのミッションでは遠隔操作による人間の操縦は不可能である。航空ロボットには通常、サイズや重量の制約が課せられており、主推進システムを手動で遠隔操作できる手段を備えていなければならない。[ 40 ] ミッション8は例外で、人間の操縦者が手振りや音声コマンドによって4機の自律航空機を操縦することができた。[ 41 ]
賞品
IARCの賞金は伝統的に「勝者総取り」ですが、コンテスト初期の頃は、優秀な成績を収めたチームには更なる発展のために金銭的な進歩賞が授与されていました。第3ミッションは3年をかけて完了し、ベルリン工科大学が最終的に3万ドルを獲得しました。[ 42 ]第4ミッションでは、すぐに優勝者が決まることはなく、各チームに数年の開発期間が必要であることが認識されました。そのため、段階的に増加する「賞金プール」が設立され、国際無人機システム協会(AUSV)が毎年1万ドルを加算しました。2008年の賞金総額は8万ドルに設定されました。第4ミッションを15分以内に完了したチームは8万ドルの賞金全額を獲得し、そうでない場合は、15分ミッションの目標に最も近づいた2008年の参加者のパフォーマンスに基づいて賞金が分配されました。 2008年までに、第4ミッションのレベル1から3が実演され、要求されるすべての空中ロボット動作が可能であることが証明されたが、2008年のイベントの終わりまでに、15分以内にすべての動作を連続してシームレスに実演できたチームは1つもなかった。したがって、8万ドルは10人の決勝進出者で分割された(ジョージア工科大学が27,700ドル、バージニア工科大学および州立大学が17,700ドル、エンブリー・リドル/デブリー・カルガリーが12,200ドルを受け取り、残りは他の決勝進出者間で実績に基づいて分配された)。[ 43 ] 2009年には、ミッション5を完了したマサチューセッツ工科大学 のチームに10,000ドルが授与された。[ 44 ] 2013年8月、清華大学のチームが第6ミッション全体を完了し、40,000ドルを獲得した。[ 45 ] その後、浙江大学は2018年にミッション7の完了に対して2万ドルを獲得し、[ 46 ]南京航空航天大学はミッション8の完了に対して1万ドルを授与されました。 [ 47 ]ミッション9はノルウェー科学技術大学 によって完了され、米国、中国、インドからの12の国際チームを相手に最高の成績を収め、2023年に1万ドルが授与されました。[ 48 ]

スピンオフ
このコンテストの創設者であるロバート・マイケルソンは、国際無人車両システム協会(AUVSI)の元会長です。[ 11 ] IARCは当初、協会が後援するロジスティクスのためのシードマネーとグランプリで設立されました。[ 49 ] IARCが最初の成功とメディアの多大な注目を集めた後、AUVSIは数年後にミシガン州デトロイトでインテリジェント地上車両コンテスト[ 50 ]を開始しました。これは、当時アメリカ陸軍戦車自動車司令部で働いていたAUVSI理事のジェリー・レーンによって企画されました。1998年には、AUVSIとアメリカ海軍研究局が協力して、米国で毎年開催される第1回国際自律型水中車両コンテスト[ 51 ]を開催し、水中コミュニティを代表しました。陸、海、空のこれらのコンテストはすべて、「完全自律性」を際立った特徴として中核に据えています。無人車両システム協会国際財団(2009年に「ロボネーション」に改名)は、多くの業界共同スポンサーがいるものの、物流と賞金でこれらの競技会を継続的に支援している。[ 52 ]
参考文献
- ^ Christian Bruyere & Peter von Puttkamer(プロデューサー、Mystique Films、2003年11月17日)。「Artificial Intelligence - Episode 1008」。「Beyond Invention」 。2012年5月29日時点のオリジナルよりアーカイブ。
- ^ "「パイロットなし、問題なし:学生が自律航空機を開発」IEEE、The Institute Online。2006年8月7日。2011年6月3日時点のオリジナルよりアーカイブ。 2019年4月8日閲覧。
- ^ Nesmith, Robert (2016年8月24日). 「ジョージア工科大学の航空機技術の最前線に立つファミリーメンバー」(PDF) . GTRIホームページ (アーカイブ) . 2016年9月10日閲覧。
- ^ロバート・マイケルソン(2000年10月)「国際航空ロボット競技会:卓越した10年間」空中、地上、海軍軍事作戦のための無人機(UV)。議事録第52巻。アンカラ(トルコ):NATO研究技術機構、応用車両技術パネル(AVT)。SC3–1~SC–24頁。
- ^ Rex Humbard(プロデューサー、Advanced Media LLC.); Brian Natwick(エグゼクティブプロデューサー、Discovery Communications、2001年2月18日)。「Airbots」。「Discovery Science Channel」 。 2016年3月3日時点のオリジナルよりアーカイブ。 2009年2月19日閲覧。
- ^ Licker, MD編 (1999). 「自律航法」, 2000 Yearbook of Science and Technology . ニューヨーク: McGraw-Hill. pp. 28– 30. ISBN 0-07-052771-7
21世紀初頭に、探索/回避ナビゲーション戦略を使用して屋内で操作できる完全自律型MAVの開発が現在進行中ですが、現在最も小型で最もインテリジェントな完全自律型ロボットは、国際航空ロボット競技会で展示されているものです
。 - ^ 「公式IARCミッション7ルール」 。 2014年1月25日閲覧。
- ^ 「上院決議1255」 。 2016年7月25日閲覧。
- ^ 「Flying High - シーズン6、エピソード3」。「Scientific American Frontiers with Alan Alda」。1996年2月7日。
- ^ a bロバート・マイケルソン(1998年3月30日~4月1日)。国際航空ロボット競技会:世界最小のインテリジェント飛行機械。第13回ブリストル国際RPV/UAVシステム会議議事録。イギリス、ブリストル。pp. 31.1~30.10。
- ^ a b Nyquist, John E. (1996年9月13日). 「オークリッジ国立研究所における環境修復への低コスト無線操縦飛行機の応用」 . CONF-9607137-2, 契約番号 DE-AC05-96OR22464. 米国エネルギー省. p. 14. OSTI 382992 .
- ^ 「Aerial Robotics」 . Research Horizons誌オンライン版、著者:Joey Goddard. 1996年11月27日. 2009年1月23日閲覧。
- ^ 「ミッション3の場所」 TU Berlin/IARC. 1992年10月20日. 2024年3月9日閲覧。
- ^ "アニマトロン" . TU Berlin/IARC. 1992年10月20日. 2024年3月9日閲覧。
- ^ “インテリジェントナビゲーションを備えた多目的航空機ロボット車両” .ベルリン工科大学。 2007-10-23 。2009 年 1 月 23 日に取得。
- ^ 「TUベルリン、2000年のミッション3で優勝」 TUベルリン/IARC、1992年10月20日。 2024年3月9日閲覧。
- ^ a b c d「第4ミッションの説明」 IARC。2001年11月11日。 2024年3月1日閲覧。
- ^ 「ジョージア工科大学、国際航空ロボット競技会第4回ミッションで優勝」 GoRobotics.net。2009年2月6日時点のオリジナルよりアーカイブ。 2009年1月23日閲覧。
- ^ 「第4ミッションの説明」 GoRobotics.net、2008年8月19日。2010年7月17日時点のオリジナルよりアーカイブ。2024年3月1日閲覧。
- ^ 「国際航空ロボット競技会 第5回ミッション」 Space Prizes Blog. 2008年9月9日. 2009年1月23日閲覧。
- ^ 「International Aerial Robotics Competition 6th Mission」 RC Michelson(主催者) 2010年9月1日オリジナルより2014年10月10日アーカイブ。 2014年8月18日閲覧。
- ^ 「IARCミッション7公式ルール」(PDF) IARC. 2014年11月30日. 2024年3月9日閲覧。
- ^ 「IARCミッション7公式ルール」(PDF) IARC. 2014年11月30日. 2024年3月9日閲覧。
- ^ 「IARC第7回ミッションの成果」 IARC、2018年8月28日。 2018年8月29日閲覧。
- ^ 「2018年『ドリームエンジェルカップ』国際航空ロボット競技会開催」北京航空航天大学(アーカイブ)2018年9月4日。2018年9月9日時点のオリジナルよりアーカイブ。 2024年3月9日閲覧。
- ^ 「IARCミッション7公式ルール」 IARC、2014年11月30日。 2024年3月9日閲覧。
- ^ 「国際航空ロボット競技会ミッション8公式ルール」(PDF) . IARC. 2018年9月22日. 2024年3月9日閲覧。
- ^ 「IARC第8回ミッションの成果」 RC Michelson(主催者)2019年12月12日。 2020年10月15日閲覧。
- ^ 「国際航空ロボット競技会 第9回ミッション」 RC Michelson(主催者) 2018年8月28日. 2018年9月15日閲覧。
- ^ 「IARCミッション9:2020-2023」 IARC、2023年10月22日。 2024年3月9日閲覧。
- ^ 「国際航空ロボット競技会ミッション9結果」 IARC。2023年10月22日。 2024年3月9日閲覧。
- ^ 「ミッション・インポッシブル完了」 Kongsberg Defence & Aerospace. 2023年11月26日. 2023年11月26日閲覧。
- ^ 「国際航空ロボット競技会 第9回ミッション」 IARC組織委員会. 2025年1月14日. 2025年5月1日閲覧。
- ^ 「IARCミッション10公式ルール」 IARC、2025年4月4日。 2025年5月1日閲覧。
- ^ 「国際航空ロボット競技会公式ルール」(PDF) 。 2009年9月2日時点のオリジナル(PDF)からアーカイブ。 2009年1月23日閲覧。
- ^ 「IARC 32年の歴史」 IARC、2023年10月22日。 2024年3月9日閲覧。
- ^ 「カリフォルニア州立大学ノースリッジ校の2008年国際航空ロボット競技会出場動画」 Ledger-Enguirer紙、著者:マイク・ハスキー。2011年7月13日時点のオリジナルよりアーカイブ。 2009年1月23日閲覧。
- ^ 「TUベルリンミッション1飛行船」 IARC。1992年10月20日。 2024年3月9日閲覧。
- ^ 「ミッション2、1996-1997」 IARC。1996年10月5日。 2024年3月9日閲覧。
- ^ 「国際航空ロボット競技会公式ルール(ミッション5)」(PDF) 2009年。 2009年9月2日時点のオリジナル(PDF)からアーカイブ。2009年2月17日閲覧。
- ^ 「国際航空ロボット競技会ミッション8公式ルール」(PDF) . IARC. 2018年9月22日. 2024年3月9日閲覧。
- ^ 「ミッション3 受賞作品」 IARC. 2000年8月22日. 2024年3月1日閲覧。
- ^ Taylor, Phillip (2008年9月). AUVSI学生コンペティション総括. 第26巻. 国際無人システム協会. pp. 30– 31.
- ^ 「ミッション5 受賞作品」 IARC. 2009年8月27日. 2024年3月1日閲覧。
- ^ 「ミッション6 受賞作品」 IARC. 2013年8月5日. 2024年3月1日閲覧。
- ^ 「ミッション7 受賞」 IARC. 2018年8月25日. 2024年3月1日閲覧。
- ^ 「ミッション8 受賞」 IARC. 2019年9月10日. 2024年3月1日閲覧。
- ^ 「ミッション9 受賞」 IARC. 2023年11月12日. 2024年3月1日閲覧。
- ^ロバート・マイケルソン (1998 年 4 月)。 「レ・プリュ・プティ・マシーン・ヴォランテ・インテリジェンテ・デュ・モンド」。RCMラジオコマンドマガジン。フランス、パリ: 22–27 . ISSN 0290-9693。
- ^ 「インテリジェント地上車両コンペティション」 。 2009年2月19日閲覧。
- ^ 「自律型水中車両コンペティション」 。 2008年5月24日時点のオリジナルよりアーカイブ。2009年2月19日閲覧。
- ^ 「RoboNationコンソーシアムのサポート」 . RoboNation. 2024年1月1日. 2024年3月1日閲覧。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
選択されたIARCレポートと出版物
- マイケルソン、RC、「自律飛行ロボット」、無人システム、第29巻-第10号、2011年10月、国際無人車両システム協会、ワシントンD.C.、38~42ページ
- Howe, J.、Vogl, M.、Banik, J.、他「サウスダコタ鉱山技術学校の航空ロボット偵察システムの設計と開発」、1994 年 AUVSI 議事録。
- Chapuis, J., Eck, C., Geering, HP, Mudra, R., 「1996年国際航空ロボット競技会へのスイスの参加」、1996年AUVSI議事録、1996年7月、フロリダ州オーランド、pp. 947–953
- Padgett, WT、「デザインコンペティションを通じたデザイン教育」、教育の最前線会議-変化の時代における教育と学習、第27回年次会議議事録、1997年11月5~8日、第3巻、pp. 1477-1480
- Koo, TJ, Shim, DH, Shakernia, O., Sinopoli, B., Ma, Y., Hoffman, F., Sastry, S., 「Berkeley 無人自律航空機における階層的ハイブリッドシステム設計」、1998 年 AUVSI 議事録、1998 年 7 月
- Greer, D., McKerrow, P., Abrantes, J., 「都市部における捜索救助活動におけるロボット」、2002年オーストラレーシア自動化会議議事録、オークランド、オーストラリアロボット工学・自動化協会、2002年11月27~29日、pp. 25~30
- Proctor, AA, Kannan, SK, Raabe, C., Christophersen, HB、および Johnson, EN、「ジョージア工科大学における自律型航空偵察システムの開発」、無人車両システム協会国際無人システムシンポジウムおよび展示会議事録、2003 年。
外部リンク
- IARC公式ウェブサイト- 国際航空ロボット競技会の公式ウェブサイト。(2018年2月26日閲覧)
- 現在のミッションの公式ルール- 現在のミッションのルールとエントリー情報(2018年2月26日閲覧)
- 過去のミッションに関する情報- 過去のミッションに関する情報(2018年2月26日閲覧)