Force directed to the center of rotation
粒子は、一連の短いキック(1、2、…)によって等速直線運動から乱され、その軌道はほぼ円形になります。この力は、軌道の曲率中心に向かって連続的に作用する力の極限において、向心力と呼ばれます。 向心力 ( ラテン語の centrum (中心)と petere (探す)に由来 [1] )は、 物体を曲線 軌道に沿わせる 力 である。向心力の方向は常に 物体の運動に 直交し 、軌道の瞬間的な 曲率中心 の固定点に向かう。この用語は アイザック・ニュートンによって考案され [2] 、 「物体を一点、あるいは中心に向かって引き寄せたり、押し進めたり、あるいは何らかの形で傾けたりする力」と説明されている。 [3] ニュートン力学 では、重力が天体の 軌道 を引き起こす向心力である 。
向心力に関する一般的な例としては、物体が円軌道に沿って等速で運動する場合が挙げられます。向心力は運動に直角に作用し、また円軌道の中心に向かって半径に沿って作用します。 [4] [5]この数学的記述は、1659年にオランダの物理学者 クリスティアーン・ホイヘンス によって導き出されました 。 [6] [7]
曲線運動の運動学 から、 曲率半径 r の経路に沿って 接線速度 v で移動する物体は、 曲率の中心に向かって速度 a c = lim Δ t → 0 Δ v Δ t 、 a c = v 2 r {\displaystyle {\textbf {a}}_{c}=\lim _{\Delta t\to 0}{\frac {\Delta {\textbf {v}}}{\Delta t}},\quad a_{c}={\frac {v^{2}}{r}}} で加速することが分かっています。 ここで、 は 求心加速度 、 はと における速度ベクトルの 差 です 。 a c {\displaystyle a_{c}} Δ v {\displaystyle \Delta {\textbf {v}}} t + Δ t {\displaystyle t+\Delta {t}} t {\displaystyle t}
ニュートンの第二法則 によれば 、加速の原因は物体に作用する正味の力であり、その力は物体の質量 mと加速度に比例する。この力は一般に 向心力 と呼ばれ 、大きさは [8] F c = m a c = m v 2 r {\displaystyle F_{c}=ma_{c}=m{\frac {v^{2}}{r}}} であり、向心加速度と同様に、物体の軌道の曲率中心に向かっている。
導出 向心加速度は、2 つの時点における速度ベクトルの図から推測できます。等速円運動の場合、速度は一定の大きさです。各速度は対応する位置ベクトルに垂直なので、単純なベクトルの減算により、角度が合同な 2 つの相似な二等辺三角形が得られます。1 つは 底辺 が で 脚の 長さが で、もう 1 つは 底辺 が (位置ベクトルの 差 ) で 脚の 長さが です 。 [9] したがって、は 次のように置き換えることができます 。 [9] 力の方向は、物体が動いている円の中心、または 接触円 (物体の局所的な経路が円形でない場合は、その経路に最もよく適合する円) に向かいます。 [10] 式の速度は 2 乗なので、一定の半径では、速度が 2 倍になると力は 4 倍になります。 Δ v {\displaystyle \Delta {\textbf {v}}} v {\displaystyle v} Δ r {\displaystyle \Delta {\textbf {r}}} r {\displaystyle r} | Δ v | v = | Δ r | r {\displaystyle {\frac {|\Delta {\textbf {v}}|}{v}}={\frac {|\Delta {\textbf {r}}|}{r}}} | Δ v | = v r | Δ r | {\displaystyle |\Delta {\textbf {v}}|={\frac {v}{r}}|\Delta {\textbf {r}}|} | Δ v | {\displaystyle |\Delta {\textbf {v}}|} v r | Δ r | {\displaystyle {\frac {v}{r}}|\Delta {\textbf {r}}|} a c = lim Δ t → 0 | Δ v | Δ t = v r lim Δ t → 0 | Δ r | Δ t = v 2 r {\displaystyle a_{c}=\lim _{\Delta t\to 0}{\frac {|\Delta {\textbf {v}}|}{\Delta t}}={\frac {v}{r}}\lim _{\Delta t\to 0}{\frac {|\Delta {\textbf {r}}|}{\Delta t}}={\frac {v^{2}}{r}}}
この力は、円の中心を回る物体の 角速度 ω で表されることもあり、接線速度と 次
の式で関係付けられる。 v = ω r {\displaystyle v=\omega r} F c = m r ω 2 . {\displaystyle F_{c}=mr\omega ^{2}\,.}
円周1周の 周期 T を用いて表すと、 ω = 2 π T {\displaystyle \omega ={\frac {2\pi }{T}}} となり、式は [11]となる。 F c = m r ( 2 π T ) 2 . {\displaystyle F_{c}=mr\left({\frac {2\pi }{T}}\right)^{2}.}
粒子加速器では、速度が非常に高くなることがある(真空中の光速 に近い )ので、同じ静止質量でより大きな慣性(相対論的質量)が生じ、同じ求心加速度を得るにはより大きな力が必要になるため、式は次のようになります。 [12] ここで、 γ = 1 1 − v 2 c 2 {\displaystyle \gamma ={\frac {1}{\sqrt {1-{\frac {v^{2}}{c^{2}}}}}}}
は ローレンツ因子 です 。 F c = γ m v 2 r {\displaystyle F_{c}={\frac {\gamma mv^{2}}{r}}}
したがって、向心力は次のように与えられます。
これは 相対論的運動量 の変化率です 。 F c = γ m v ω {\displaystyle F_{c}=\gamma mv\omega } γ m v {\displaystyle \gamma mv}
出典 等速円運動 をしている物体は、 その円軌道を維持するために、図に示すように軸に向かう向心力を必要とします。 ロープの端で水平面内で揺動する物体の場合、物体にかかる向心力はロープの張力によって生じます。ロープの例は「引っ張る」力を伴う例です。向心力は「押す」力としても作用します。例えば、ウォール ・オブ・デス や ローター ライダーの向心力は、壁の垂直抗力によって生じる場合などが挙げられます。
ニュートン の求心力の考え方は、今日では 中心力 と呼ばれているものに対応しています。 衛星が 惑星の周り を 周回し ている場合 、重力は求心力とみなされますが、偏心軌道の場合、重力は瞬間曲率中心ではなく焦点に向けられます。 [13]
求心力のもう一つの例は、荷電粒子が均一磁場 中を他の外力が存在しない状態で運動するときに描かれる螺旋です 。この場合、磁力は螺旋軸に向かって作用する求心力です。
いくつかの事例の分析 以下は、速度と加速度を支配する公式の導出を伴う、複雑さが増す 3 つの例です。
等速円運動とは、回転速度が一定である場合を指します。このケースを説明するには、2つの方法があります。
微積分導出 2次元では、大きさ(長さ)を持ち x軸から上向きの 角度を向く 位置ベクトルは、 単位ベクトル と を使用して 直交座標 で表すことができます。 [14] r {\displaystyle {\textbf {r}}} r {\displaystyle r} θ {\displaystyle \theta } x ^ {\displaystyle {\hat {\mathbf {x} }}} y ^ {\displaystyle {\hat {\mathbf {y} }}} r = r cos ( θ ) x ^ + r sin ( θ ) y ^ . {\displaystyle {\textbf {r}}=r\cos(\theta ){\hat {\mathbf {x} }}+r\sin(\theta ){\hat {\mathbf {y} }}.}
等速円運動 を仮定するには、 次の 3 つの条件が必要です。
オブジェクトは円上のみを移動します。 円の半径は 時間とともに変化しません。 r {\displaystyle r} 物体は一定の 角速度 で円周を回っています。したがって、時間は どこに ありますか。 ω {\displaystyle \omega } θ = ω t {\displaystyle \theta =\omega t} t {\displaystyle t} 運動の速度 と 加速度は 、 時間に対する位置の1次および2次導関数です。 v {\displaystyle {\textbf {v}}} a {\displaystyle {\textbf {a}}}
r = r cos ( ω t ) x ^ + r sin ( ω t ) y ^ , {\displaystyle {\textbf {r}}=r\cos(\omega t){\hat {\mathbf {x} }}+r\sin(\omega t){\hat {\mathbf {y} }},} ここで、v = r˙ = − r ω sin ( ω t ) x ^ + r ω cos ( ω t ) y ^ , {\displaystyle {\textbf {v}}={\dot {\textbf {r}}}=-r\omega \sin(\omega t){\hat {\mathbf {x} }}+r\omega \cos(\omega t){\hat {\mathbf {y} }},} a = r¨ = − ω 2 ( r cos ( ω t ) x ^ + r sin ( ω t ) y ^ ) . {\displaystyle {\textbf {a}}={\ddot {\textbf {r}}}=-\omega ^{2}(r\cos(\omega t){\hat {\mathbf {x} }}+r\sin(\omega t){\hat {\mathbf {y} }})。
括弧内の項は、 直交座標 におけるの元の表現です 。したがって、 負の符号は加速度が円の中心(半径の反対側)に向かっていることを示しており、そのため「求心的」(つまり「中心を求める」)と呼ばれます。物体は( 慣性 により)自然に直線経路をたどりますが、この求心加速度は求心力によって引き起こされる円運動の経路を表します。 r {\displaystyle {\textbf {r}}} a = − ω 2 r . {\displaystyle {\textbf {a}}=-\omega ^{2}{\textbf {r}}.}
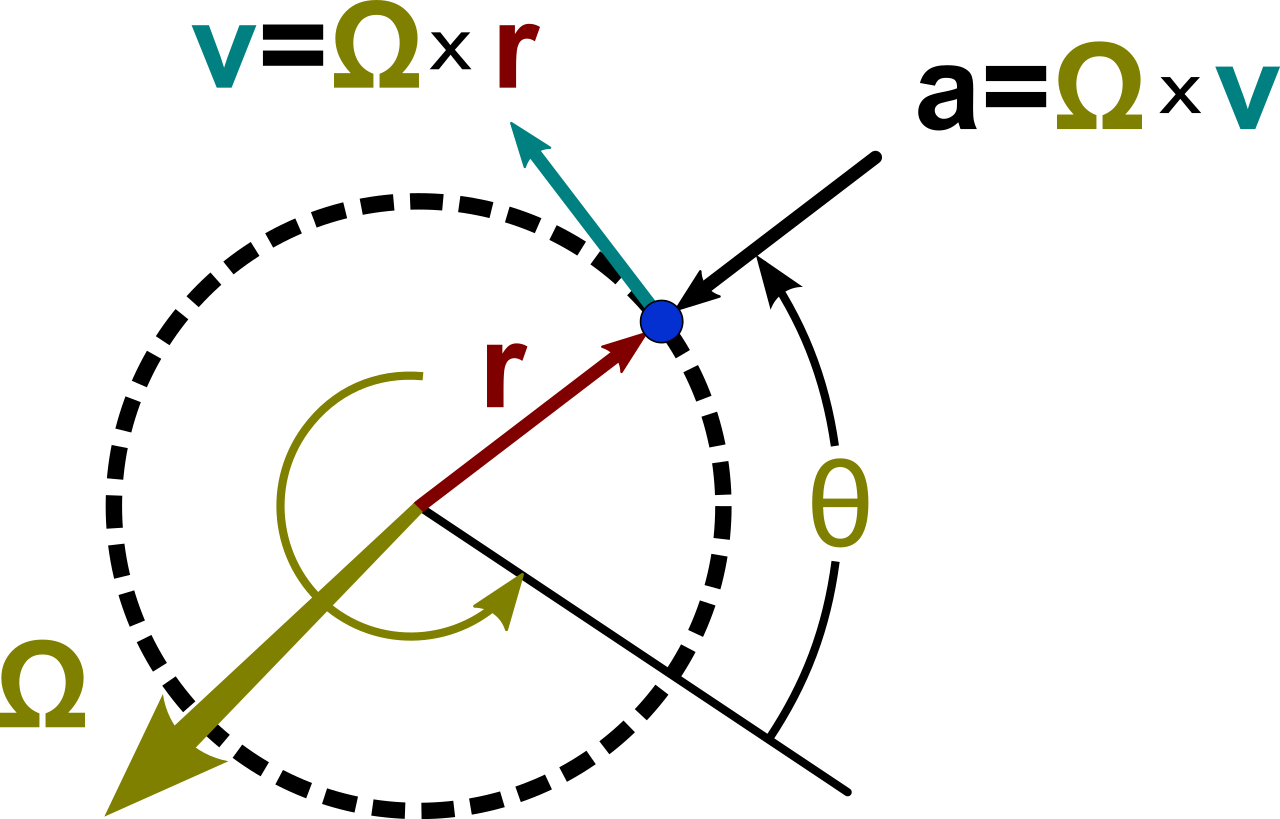
ベクトルを使った導出 等速円運動のベクトル関係。回転を表すベクトル Ω は 、右手の法則 によって決定される極性と大きさ dθ / dt を持つ軌道平面に対して垂直です 。 右の図は、等速円運動におけるベクトルの関係を示しています。回転自体は、角速度ベクトル Ω で表されます。これは軌道面に垂直であり( 右手の法則 を使用)、大きさは次のように表されます。
| Ω | = d θ d t = ω , {\displaystyle |\mathbf {\Omega } |={\frac {\mathrm {d} \theta }{\mathrm {d} t}}=\omega \ ,} ここで、 θ は時刻 t における角度位置である 。この節では、d θ /d t は時間に依存せず一定であると仮定する。粒子が 円軌道に沿って
時刻 d t に移動する距離 dℓは、
d ℓ = Ω × r ( t ) d t , {\displaystyle \mathrm {d} {\boldsymbol {\ell }}=\mathbf {\Omega } \times \mathbf {r} (t)\mathrm {d} t\ ,} これは、ベクトル外積 の性質により 、大きさ r d θ を持ち、円経路に接する方向にあります。
その結果、
d r d t = lim Δ t → 0 r ( t + Δ t ) − r ( t ) Δ t = d ℓ d t . {\displaystyle {\frac {\mathrm {d} \mathbf {r} }{\mathrm {d} t}}=\lim _{{\Delta }t\to 0}{\frac {\mathbf {r} (t+{\Delta }t)-\mathbf {r} (t)}{{\Delta }t}}={\frac {\mathrm {d} {\boldsymbol {\ell }}}{\mathrm {d} t}}\ .} 言い換えると、
v = d e f d r d t = d ℓ d t = Ω × r ( t ) . {\displaystyle \mathbf {v} \ {\stackrel {\mathrm {def} }{=}}\ {\frac {\mathrm {d} \mathbf {r} }{\mathrm {d} t}}={\frac {\mathrm {d} \mathbf {\boldsymbol {\ell }} }{\mathrm {d} t}}=\mathbf {\Omega } \times \mathbf {r} (t)\ .} 時間に関して微分すると、 a = d e f d v d t = Ω × d r ( t ) d t = Ω × [ Ω × r ( t ) ] . {\displaystyle \mathbf {a} \ {\stackrel {\mathrm {def} }{=}}\ {\frac {\mathrm {d} \mathbf {v} }{d\mathrm {t} }}=\mathbf {\Omega } \times {\frac {\mathrm {d} \mathbf {r} (t)}{\mathrm {d} t}}=\mathbf {\Omega } \times \left[\mathbf {\Omega } \times \mathbf {r} (t)\right]\ .}
ラグランジュの公式 は次のように述べます。 a × ( b × c ) = b ( a ⋅ c ) − c ( a ⋅ b ) . {\displaystyle \mathbf {a} \times \left(\mathbf {b} \times \mathbf {c} \right)=\mathbf {b} \left(\mathbf {a} \cdot \mathbf {c} \right)-\mathbf {c} \left(\mathbf {a} \cdot \mathbf {b} \right)\ .}
ラグランジュの公式を、常に Ω・r ( t )=0という観測に基づいて適用すると、 a = − | Ω | 2 r ( t ) . {\displaystyle \mathbf {a} =-{|\mathbf {\Omega |} }^{2}\mathbf {r} (t)\ .}
言葉で言えば、加速度は 常に
半径方向の変位 rと正反対の方向を向いており、大きさを持ちます。ここで、縦棒 |...| はベクトルの大きさを表し、 r ( t )
の場合は 単に経路の半径 r です。この結果は、表記が若干異なりますが、前のセクションの結果と一致しています。 | a | = | r ( t ) | ( d θ d t ) 2 = r ω 2 {\displaystyle |\mathbf {a} |=|\mathbf {r} (t)|\left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}=r{\omega }^{2}}
非一様円運動の解析において回転速度を一定にすると、その解析はこの解析と一致します。
ベクトルアプローチの利点は、どの座標系からも明らかに独立していることです。
例: バンクターン 上図:一定速度v で移動するバンク付き円形軌道上のボール ;下図:ボールにかかる力 右図の上段は、バンク角のあるカーブ上を円運動するボールを示しています。このカーブは水平面から θの 角度でバンクしており、路面は滑りやすい状態と想定されます。ボールが路面から滑り落ちないようにするには、どの程度のバンク角が必要かを探ることが目的です。 [15] 直感的に、バンク角のない平坦なカーブではボールは路面から滑り落ちるだけですが、非常に急なバンク角では、ボールはカーブを速く通過しない限り、カーブの中央に向かって滑り落ちてしまいます。
経路の方向に発生する可能性のある加速とは別に、上の画像の下のパネルは、ボールにかかる力を示しています。力は 2 つ あります。1 つはボールの 質量の中心 を通る垂直下向きの重力 m g で、 m はボールの質量、 gは 重力加速度 です 。2 つ目は、 道路が路面に対して直角に及ぼす上向きの 法線力 m a n です。曲線運動に必要な向心力も上に示されています。この向心力はボールに適用される 3 番目の力ではなく、法線 力 と 重力の ベクトルの 加算 によって生じるボールへの 正味の力 によって提供される必要があります。道路によって及ぼされる法線力と 重力による垂直 力 の ベクトルの加算 によって得られるボールへの 結果の 力、つまり正味の力 は、円形の経路を移動する必要があることによって引き起こされる向心力と等しくなければなりません。曲線運動は、この正味の力が運動に必要な向心力を提供する限り維持されます。
ボールにかかる水平方向の正味の力は、道路からの力の水平成分で、大きさは | F h | = m | a n | sin θ です。道路からの力の垂直成分は、重力に対抗する必要があります: | F v | = m | a n | cos θ = m | g | 、つまり | a n | = | g | / cos θ です。上記の式に | F h | を代入すると、水平方向の力は次のようになります: | F h | = m | g | sin θ cos θ = m | g | tan θ 。 {\displaystyle |\mathbf {F} _{\mathrm {h} }|=m|\mathbf {g} |{\frac {\sin \theta }{\cos \theta }}=m|\mathbf {g} |\tan \theta \,.}
一方、半径 r の円軌道上の速度 | v | では、運動学によれば、ボールを連続的に回転させるために必要な力は、半径方向内側への求心力 F c の大きさです。 | F c | = m | a c | = m | v | 2 r . {\displaystyle |\mathbf {F} _{\mathrm {c} }|=m|\mathbf {a} _{\mathrm {c} }|={\frac {m|\mathbf {v} |^{2}}{r}}\,.}
その結果、道路の角度が条件を満たすように設定されているとき、ボールは安定した軌道を描きます。 または、 m | g | tan θ = m | v | 2 r , {\displaystyle m|\mathbf {g} |\tan \theta ={\frac {m|\mathbf {v} |^{2}}{r}}\,,} tan θ = | v | 2 | g | r . {\displaystyle \tan \theta ={\frac {|\mathbf {v} |^{2}}{|\mathbf {g} |r}}\,.}
バンク角 θ が90° に近づくと、 接線関数は 無限大に近づき、 | v | 2 / r の値が大きくなる。つまり、この式は、速度が速い( | v | が大きい)ほど道路のバンク角が急になる( θ が大きい)必要があり、カーブが急な( r が小さい)ほど道路のバンク角も急になる必要があることを示しており、これは直感に合致する。角度 θ が上記の条件を満たさない場合、道路によって及ぼされる水平方向の力の成分は適切な求心力を提供できず、その差を補うために路面の接線方向の摩擦力がさらに必要になる。 摩擦が これを果たせない場合(つまり、 摩擦係数 が超過した場合)、ボールはバランスが取れる異なる半径まで滑る。 [16] [17]
これらの考え方は航空飛行にも当てはまります。FAAパイロットマニュアルを参照してください。 [18]
/ R . [ 明確にする ] 等速円運動のケースを一般化して、回転角速度が一定ではないと仮定します。この場合、加速度は右図に示すように接線成分を持ちます。このケースは、 極座標系 に基づく微分法を示すために用いられます。
r ( t )を 質点 の位置を時間の関数として 表すベクトルとする。 円運動 を仮定しているので、 r ( t ) = R · u r とする。ここで、 R は定数(円の半径)、 u r は原点から質点に向かう 単位ベクトル である。 u r の方向はθ で表され 、これは x 軸と単位ベクトルの間の角度であり、x 軸から反時計回りに測られる。極座標のもう 1 つの単位ベクトル u θは u r に垂直で、 θ が増加する方向を指す。これらの極単位ベクトルは、 x 方向および y方向の 直交 単位ベクトル で表すことができ 、それぞれおよび で表される 。 [19] および i ^ {\displaystyle {\hat {\mathbf {i} }}} j ^ {\displaystyle {\hat {\mathbf {j} }}} u r = cos θ i ^ + sin θ j ^ {\displaystyle \mathbf {u} _{r}=\cos \theta \ {\hat {\mathbf {i} }}+\sin \theta \ {\hat {\mathbf {j} }}} u θ = − sin θ i ^ + cos θ j ^ . {\displaystyle \mathbf {u} _{\theta }=-\sin \theta \ {\hat {\mathbf {i} }}+\cos \theta \ {\hat {\mathbf {j} }}.}
速度を求めるには微分します。 ここで ω は角速度 dθ / dt です。 v = r d u r d t = r d d t ( cos θ i ^ + sin θ j ^ ) = r d θ d t d d θ ( cos θ i ^ + sin θ j ^ ) = r d θ d t ( − sin θ i ^ + cos θ j ^ ) = r d θ d t u θ = ω r u θ {\displaystyle {\begin{aligned}\mathbf {v} &=r{\frac {d\mathbf {u} _{r}}{dt}}\\&=r{\frac {d}{dt}}\left(\cos \theta \ {\hat {\mathbf {i} }}+\sin \theta \ {\hat {\mathbf {j} }}\right)\\&=r{\frac {d\theta }{dt}}{\frac {d}{d\theta }}\left(\cos \theta \ {\hat {\mathbf {i} }}+\sin \theta \ {\hat {\mathbf {j} }}\right)\\&=r{\frac {d\theta }{dt}}\left(-\sin \theta \ {\hat {\mathbf {i} }}+\cos \theta \ {\hat {\mathbf {j} }}\right)\\&=r{\frac {d\theta }{dt}}\mathbf {u} _{\theta }\\&=\omega r\mathbf {u} _{\theta }\end{aligned}}}
この速度に関する結果は、速度が円の接線方向に向いており、速度の大きさが rω で あるという予想と一致しています。再度微分すると、 加速度 a は次の式で表されます。 d u θ d t = − d θ d t u r = − ω u r , {\displaystyle {\frac {d\mathbf {u} _{\theta }}{dt}}=-{\frac {d\theta }{dt}}\mathbf {u} _{r}=-\omega \mathbf {u} _{r}\ ,} a = r ( d ω d t u θ − ω 2 u r ) . {\displaystyle \mathbf {a} =r\left({\frac {d\omega }{dt}}\mathbf {u} _{\theta }-\omega ^{2}\mathbf {u} _{r}\right)\ .}
したがって、加速度の半径方向および接線方向の成分は次のようになります。 ここ で 、| v | = r ω は速度の大きさ (速さ) です。 a r = − ω 2 r u r = − | v | 2 r u r {\displaystyle \mathbf {a} _{r}=-\omega ^{2}r\ \mathbf {u} _{r}=-{\frac {|\mathbf {v} |^{2}}{r}}\ \mathbf {u} _{r}} a θ = r d ω d t u θ = d | v | d t u θ , {\displaystyle \mathbf {a} _{\theta }=r\ {\frac {d\omega }{dt}}\ \mathbf {u} _{\theta }={\frac {d|\mathbf {v} |}{dt}}\ \mathbf {u} _{\theta }\ ,}
これらの方程式は、速度が変化しながら円形の経路に沿って移動する物体の場合、物体の加速度が、運動の方向を変える 垂直成分 (求心加速度) と、速度を変える 平行または 接線成分に分解できることを数学的に表現しています。
一般的な平面運動
平面極座標における運動学ベクトル。設定は2次元空間に限定されず、任意の高次元平面にも適用できることに注意してください。
軌道r ( t )を持つ粒子の、 時刻 t と t + dt における極単位ベクトル。左側では、2つの時刻における単位ベクトル u ρ と u θ が 、それぞれの尾が全て交わるように移動され、単位半径の円の弧を描くように描かれている。時刻 dtにおける回転角は d θであり 、軌道 r ( t ) の回転角とちょうど同じである。
極座標 上記の結果は、極座標系 ではより簡潔に導くことができ 、同時に次に示すように平面内の一般的な運動にも拡張できる。平面上の極座標系では、上に示したように、放射状の単位ベクトル u ρ と角度の単位ベクトル u θ が用いられる。 [20]位置 r にある粒子は次 のように記述される。
r = ρ u ρ , {\displaystyle \mathbf {r} =\rho \mathbf {u} _{\rho }\ ,}
ここで、原点からの経路の距離を表すのに Rではなく ρ という表記が使われているのは 、この距離が固定ではなく時間とともに変化することを強調するためである。単位ベクトル u ρ は粒子とともに動き、常に r ( t ) と同じ方向を指す。単位ベクトル u θ も粒子とともに動き、 u ρ に直交する。したがって、 u ρ と u θ は 粒子に付随し、粒子が移動した経路に結び付けられた局所直交座標系を形成する。 [21] 単位ベクトルを移動してその尾が一致するようにすると、上の画像の左側の円に見られるように、 u ρ と u θが直角のペアを形成し、その先端が単位円上にあり、この円の周囲を r ( t )と同じ角度 θ ( t )で前後にたどることがわかる 。
粒子が動くとき、その速度は
v = d ρ d t u ρ + ρ d u ρ d t . {\displaystyle \mathbf {v} ={\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\rho }+\rho {\frac {\mathrm {d} \mathbf {u} _{\rho }}{\mathrm {d} t}}\,.} 速度を評価するには、単位ベクトルu ρ の微分 が必要です。u ρ は 単位ベクトルであるため、その大きさは固定で、方向のみ変化します。つまり、その変化 d u ρは u ρ に垂直な成分のみを持ちます 。軌道 r ( t ) が d θ 回転すると、 r ( t )と同じ方向を向いている u ρ も d θ回転します。上の図を参照してください。したがって、 u ρ の変化 は
d u ρ = u θ d θ , {\displaystyle \mathrm {d} \mathbf {u} _{\rho }=\mathbf {u} _{\theta }\mathrm {d} \theta \,,} または
d u ρ d t = u θ d θ d t . {\displaystyle {\frac {\mathrm {d} \mathbf {u} _{\rho }}{\mathrm {d} t}}=\mathbf {u} _{\theta }{\frac {\mathrm {d} \theta }{\mathrm {d} t}}\,.} 同様の方法で、 u θ の変化率を 求めます。u ρ と同様に 、 u θ は 単位 ベクトルであり、大きさを変えずに回転することしかできません。 軌道 r ( t ) が d θだけ回転する間、 u ρ に直交し続けるために、 r ( t )に直交する u θ も d θ だけ回転します。上の図を参照してください。したがって、変化 d u θは u θ に直交し 、d θ に比例します(上の図を参照)。
d u θ d t = − d θ d t u ρ . {\displaystyle {\frac {\mathrm {d} \mathbf {u} _{\theta }}{\mathrm {d} t}}=-{\frac {\mathrm {d} \theta }{\mathrm {d} t}}\mathbf {u} _{\rho }\,.} 上記の式では符号が負であることがわかります。直交性を維持するために、 d u ρ が d θ に対して正であれば、 d u θ は 減少する必要があります。
u ρ の導関数を 速度の式に代入すると、
v = d ρ d t u ρ + ρ u θ d θ d t = v ρ u ρ + v θ u θ = v ρ + v θ . {\displaystyle \mathbf {v} ={\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\rho }+\rho \mathbf {u} _{\theta }{\frac {\mathrm {d} \theta }{\mathrm {d} t}}=v_{\rho }\mathbf {u} _{\rho }+v_{\theta }\mathbf {u} _{\theta }=\mathbf {v} _{\rho }+\mathbf {v} _{\theta }\,.} 加速度を得るために、もう一度時間微分を行います。
a = d 2 ρ d t 2 u ρ + d ρ d t d u ρ d t + d ρ d t u θ d θ d t + ρ d u θ d t d θ d t + ρ u θ d 2 θ d t 2 . {\displaystyle \mathbf {a} ={\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}\mathbf {u} _{\rho }+{\frac {\mathrm {d} \rho }{\mathrm {d} t}}{\frac {\mathrm {d} \mathbf {u} _{\rho }}{\mathrm {d} t}}+{\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\theta }{\frac {\mathrm {d} \theta }{\mathrm {d} t}}+\rho {\frac {\mathrm {d} \mathbf {u} _{\theta }}{\mathrm {d} t}}{\frac {\mathrm {d} \theta }{\mathrm {d} t}}+\rho \mathbf {u} _{\theta }{\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\,.} uρ と uθ の導関数を代入すると 、粒子の加速度は次のようになる。 [ 22 ]
a = d 2 ρ d t 2 u ρ + 2 d ρ d t u θ d θ d t − ρ u ρ ( d θ d t ) 2 + ρ u θ d 2 θ d t 2 , = u ρ [ d 2 ρ d t 2 − ρ ( d θ d t ) 2 ] + u θ [ 2 d ρ d t d θ d t + ρ d 2 θ d t 2 ] = u ρ [ d v ρ d t − v θ 2 ρ ] + u θ [ 2 ρ v ρ v θ + ρ d d t v θ ρ ] . {\displaystyle {\begin{aligned}\mathbf {a} &={\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}\mathbf {u} _{\rho }+2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\theta }{\frac {\mathrm {d} \theta }{\mathrm {d} t}}-\rho \mathbf {u} _{\rho }\left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}+\rho \mathbf {u} _{\theta }{\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\ ,\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{\theta }\left[2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}{\frac {\mathrm {d} \theta }{\mathrm {d} t}}+\rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} v_{\rho }}{\mathrm {d} t}}-{\frac {v_{\theta }^{2}}{\rho }}\right]+\mathbf {u} _{\theta }\left[{\frac {2}{\rho }}v_{\rho }v_{\theta }+\rho {\frac {\mathrm {d} }{\mathrm {d} t}}{\frac {v_{\theta }}{\rho }}\right]\,.\end{aligned}}} 具体的な例として、粒子が一定半径 R の円内を動く場合、 d ρ /d t = 0、 v = v θ となり、次のようになります。
a = u ρ [ − ρ ( d θ d t ) 2 ] + u θ [ ρ d 2 θ d t 2 ] = u ρ [ − v 2 r ] + u θ [ d v d t ] {\displaystyle \mathbf {a} =\mathbf {u} _{\rho }\left[-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{\theta }\left[\rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]=\mathbf {u} _{\rho }\left[-{\frac {v^{2}}{r}}\right]+\mathbf {u} _{\theta }\left[{\frac {\mathrm {d} v}{\mathrm {d} t}}\right]\ }
どこ v = v θ . {\displaystyle v=v_{\theta }.}
これらの結果は、上記の非一様円運動の結果と一致する。非一様円運動 に関する記事も参照のこと 。この加速度に粒子の質量を乗じると、最初の項は向心力となり、 角加速度に関連する2番目の項の負の項は オイラー力 と呼ばれることがある 。 [23]
円運動以外の軌道、例えば上図に示すようなより一般的な軌道の場合、軌道の瞬間的な回転中心と曲率半径は、 u ρ と u θ で定義される座標系、および長さ | r ( t )| = ρ とは間接的にしか関係がありません。したがって、一般的なケースでは、上記の一般的な加速度方程式から求心力とオイラー項を切り離すことは容易ではありません。 [24] [25] この問題を直接扱うには、次に述べるように、局所座標を用いるのが適切です。
ローカル座標 曲線上の平面運動の局所座標系。 曲線に沿った距離 s と s + ds の2つの異なる位置が示されている。各位置 s において、単位ベクトル u n は曲線の外向きの法線に沿い、単位ベクトル u t は経路に接している。経路の曲率半径は、曲線の接線の円弧長に対する回転速度から求められる ρ であり、 位置 sにおける 接触円の半径である。左側の単位円は、 s による単位ベクトルの回転を示している 。 局所座標とは、粒子と共に移動する座標の集合を指し [26] 、粒子の軌道によって方向が決定されます [27] 。単位ベクトルは、右図に示すように、軌道に対して接線方向と法線方向の両方で形成されます。この座標系は、これらの単位ベクトルを指して、 固有 座標または 軌道座標 [28] [29] 、あるいは 法線接線方向の略称である nt座標 と呼ばれることもあります。これらの座標は、微分形式理論におけるより一般的な局所座標の概念の非常に特殊な例です [30] 。
粒子の経路に沿った距離は弧の長さ s であり、時間の既知の関数であると考えられます。
s = s ( t ) . {\displaystyle s=s(t)\ .} 曲率中心は、法線 u n ( s )に沿った直線上で、曲線から 距離 ρ ( 曲率半径)にある各位置 s に定義されます。弧長 s における必要な距離 ρ ( s )は、曲線の接線の回転速度によって定義され、これは経路自体によって決定されます。ある開始位置に対する接線の向きが θ ( s )である場合、 ρ ( s )は導関数d θ /d s によって定義されます。
1 ρ ( s ) = κ ( s ) = d θ d s . {\displaystyle {\frac {1}{\rho (s)}}=\kappa (s)={\frac {\mathrm {d} \theta }{\mathrm {d} s}}\ .} 曲率半径は通常は正(つまり絶対値)として扱われますが、 曲率 κ は符号付き量です。
曲率中心と曲率半径を求める幾何学的アプローチでは、 接触円 に至る極限過程を用いる。 [31] [32] 上の図を参照。
これらの座標を用いると、軌道に沿った運動は、中心が常に変化する円軌道の連続として捉えられ、各位置 s において、半径 ρの 非一様円運動 が構成される 。この場合、回転角速度の局所的な値は次のように与えられる。
ω ( s ) = d θ d t = d θ d s d s d t = 1 ρ ( s ) d s d t = v ( s ) ρ ( s ) , {\displaystyle \omega (s)={\frac {\mathrm {d} \theta }{\mathrm {d} t}}={\frac {\mathrm {d} \theta }{\mathrm {d} s}}{\frac {\mathrm {d} s}{\mathrm {d} t}}={\frac {1}{\rho (s)}}\ {\frac {\mathrm {d} s}{\mathrm {d} t}}={\frac {v(s)}{\rho (s)}}\ ,} 局所速度 v は次のように与えられる。
v ( s ) = d s d t . {\displaystyle v(s)={\frac {\mathrm {d} s}{\mathrm {d} t}}\ .} 上記の他の例と同様に、単位ベクトルは大きさを変えることができないため、その変化率は常にその方向に対して垂直になります(上の画像の左側の挿入図を参照)。 [33]
d u n ( s ) d s = u t ( s ) d θ d s = u t ( s ) 1 ρ ; {\displaystyle {\frac {d\mathbf {u} _{\mathrm {n} }(s)}{ds}}=\mathbf {u} _{\mathrm {t} }(s){\frac {d\theta }{ds}}=\mathbf {u} _{\mathrm {t} }(s){\frac {1}{\rho }}\ ;} d u t ( s ) d s = − u n ( s ) d θ d s = − u n ( s ) 1 ρ . {\displaystyle {\frac {d\mathbf {u} _{\mathrm {t} }(s)}{\mathrm {d} s}}=-\mathbf {u} _{\mathrm {n} }(s){\frac {\mathrm {d} \theta }{\mathrm {d} s}}=-\mathbf {u} _{\mathrm {n} }(s){\frac {1}{\rho }}\ .} したがって、速度と加速度は次のようになります。 [32] [34] [35]
v ( t ) = v u t ( s ) ; {\displaystyle \mathbf {v} (t)=v\mathbf {u} _{\mathrm {t} }(s)\ ;} 微分の連鎖律 を使うと :
a ( t ) = d v d t u t ( s ) − v 2 ρ u n ( s ) ; {\displaystyle \mathbf {a} (t)={\frac {\mathrm {d} v}{\mathrm {d} t}}\mathbf {u} _{\mathrm {t} }(s)-{\frac {v^{2}}{\rho }}\mathbf {u} _{\mathrm {n} }(s)\ ;} 接線加速度で d v d t = d v d s d s d t = d v d s v . {\displaystyle {\frac {\mathrm {\mathrm {d} } v}{\mathrm {\mathrm {d} } t}}={\frac {\mathrm {d} v}{\mathrm {d} s}}\ {\frac {\mathrm {d} s}{\mathrm {d} t}}={\frac {\mathrm {d} v}{\mathrm {d} s}}\ v\ .} この局所座標系では、加速度は局所半径ρ ( s )を持つ不均一円運動の式に似ており 、求心加速度は第2項として表される。 [36]
このアプローチを3次元空間曲線に拡張すると、 フレネ・セレの公式 が得られる。 [37] [38]
代替アプローチ 上の図を見ると、 弧長 d s = ρ ( s )d θを計算する際に、 ρ ( s ) と ρ ( s + d s ) の曲率の差が適切に考慮されているかどうか疑問に思うかもしれません。この点については、以下に概説するより正式なアプローチを用いることで、より明確にすることができます。このアプローチは、 曲率 に関する記事とも関連しています 。
局所座標系の単位ベクトルを導入する一つの方法は、直交座標系から始めて、局所座標系を直交座標系で記述することである。弧長s を用いて 、経路を次のように記述する: [39] r ( s ) = [ x ( s ) , y ( s ) ] . {\displaystyle \mathbf {r} (s)=\left[x(s),\ y(s)\right].}
すると、パス d s に沿った増分変位は次のように記述されます。 d r ( s ) = [ d x ( s ) , d y ( s ) ] = [ x ′ ( s ) , y ′ ( s ) ] d s , {\displaystyle \mathrm {d} \mathbf {r} (s)=\left[\mathrm {d} x(s),\ \mathrm {d} y(s)\right]=\left[x'(s),\ y'(s)\right]\mathrm {d} s\ ,}
ここで、プライムはs に関する微分を表すために導入されている 。この変位の大きさは d s であり、次式で表される。 [40]
[ x ′ ( s ) 2 + y ′ ( s ) 2 ] = 1 . {\displaystyle \left[x'(s)^{2}+y'(s)^{2}\right]=1\ .} (式1) この変位は必然的に曲線の s における接線となり、曲線に接する単位ベクトルは次のようになる。 一方、曲線に垂直な外向きの単位ベクトルは u t ( s ) = [ x ′ ( s ) , y ′ ( s ) ] , {\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[x'(s),\ y'(s)\right],} u n ( s ) = [ y ′ ( s ) , − x ′ ( s ) ] , {\displaystyle \mathbf {u} _{\mathrm {n} }(s)=\left[y'(s),\ -x'(s)\right],}
直交性は、ベクトルの 内積 がゼロであることを示すことで検証できます。これらのベクトルの単位大きさは、式1の結果です。接線ベクトルを用いると、 曲線の接線の 角度 θ は次のように表されます。 sin θ = y ′ ( s ) x ′ ( s ) 2 + y ′ ( s ) 2 = y ′ ( s ) ; {\displaystyle \sin \theta ={\frac {y'(s)}{\sqrt {x'(s)^{2}+y'(s)^{2}}}}=y'(s)\ ;} cos θ = x ′ ( s ) x ′ ( s ) 2 + y ′ ( s ) 2 = x ′ ( s ) . {\displaystyle \cos \theta ={\frac {x'(s)}{\sqrt {x'(s)^{2}+y'(s)^{2}}}}=x'(s)\ .}
曲率半径は、次のように完全に正式に(幾何学的解釈を必要とせずに)導入されます。 1 ρ = d θ d s . {\displaystyle {\frac {1}{\rho }}={\frac {\mathrm {d} \theta }{\mathrm {d} s}}\ .}
θ の導関数はsin θ の導関数から求めることができます 。 d sin θ d s = cos θ d θ d s = 1 ρ cos θ = 1 ρ x ′ ( s ) . {\displaystyle {\frac {\mathrm {d} \sin \theta }{\mathrm {d} s}}=\cos \theta {\frac {\mathrm {d} \theta }{\mathrm {d} s}}={\frac {1}{\rho }}\cos \theta \ ={\frac {1}{\rho }}x'(s)\ .}
ここで、 分母は 1 です。 この正弦微分の公式を使用すると、曲率半径は次のようになります。 ここで、形式の同値性は、式 1 の微分から生じます。 これらの結果から、加速度を求めることができます。 これは、単位ベクトル u t ( s ) および u n ( s ) とのドット積を取ることで確認できます。 加速に関するこの結果は、半径 ρ に基づく円運動の結果と同じです 。 慣性フレームでこの座標系を使用すると、軌道に垂直な力を向心力、軌道に平行な力を接線力として簡単に識別できます。 定性的な観点から、限られた時間、経路を円弧で近似することができ、限られた時間、特定の曲率半径が適用され、その半径の円運動に基づいて遠心力とオイラー力を分析できます。 d sin θ d s = d d s y ′ ( s ) x ′ ( s ) 2 + y ′ ( s ) 2 = y ″ ( s ) x ′ ( s ) 2 − y ′ ( s ) x ′ ( s ) x ″ ( s ) ( x ′ ( s ) 2 + y ′ ( s ) 2 ) 3 / 2 , {\displaystyle {\frac {\mathrm {d} \sin \theta }{\mathrm {d} s}}={\frac {\mathrm {d} }{\mathrm {d} s}}{\frac {y'(s)}{\sqrt {x'(s)^{2}+y'(s)^{2}}}}={\frac {y''(s)x'(s)^{2}-y'(s)x'(s)x''(s)}{\left(x'(s)^{2}+y'(s)^{2}\right)^{3/2}}}\ ,} d θ d s = 1 ρ = y ″ ( s ) x ′ ( s ) − y ′ ( s ) x ″ ( s ) = y ″ ( s ) x ′ ( s ) = − x ″ ( s ) y ′ ( s ) , {\displaystyle {\frac {\mathrm {d} \theta }{\mathrm {d} s}}={\frac {1}{\rho }}=y''(s)x'(s)-y'(s)x''(s)={\frac {y''(s)}{x'(s)}}=-{\frac {x''(s)}{y'(s)}}\ ,} x ′ ( s ) x ″ ( s ) + y ′ ( s ) y ″ ( s ) = 0 . {\displaystyle x'(s)x''(s)+y'(s)y''(s)=0\ .} a ( s ) = d d t v ( s ) = d d t [ d s d t ( x ′ ( s ) , y ′ ( s ) ) ] = ( d 2 s d t 2 ) u t ( s ) + ( d s d t ) 2 ( x ″ ( s ) , y ″ ( s ) ) = ( d 2 s d t 2 ) u t ( s ) − ( d s d t ) 2 1 ρ u n ( s ) {\displaystyle {\begin{aligned}\mathbf {a} (s)&={\frac {\mathrm {d} }{\mathrm {d} t}}\mathbf {v} (s)={\frac {\mathrm {d} }{\mathrm {d} t}}\left[{\frac {\mathrm {d} s}{\mathrm {d} t}}\left(x'(s),\ y'(s)\right)\right]\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)+\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}\left(x''(s),\ y''(s)\right)\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)-\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}{\frac {1}{\rho }}\mathbf {u} _{\mathrm {n} }(s)\end{aligned}}}
加速度に関するこの結果は、先に得られた結果と一致しています。しかし、このアプローチでは、 s による曲率半径の変化の問題は、幾何学的解釈と整合しつつもそれに依存することなく、完全に形式的に扱われています。これにより、上図から示唆される ρ の変化を無視することに関する疑問を回避できます 。
例: 円運動 上記の式を説明するために、 x 、 y を 次のように与えます。
x = α cos s α ; y = α sin s α . {\displaystyle x=\alpha \cos {\frac {s}{\alpha }}\ ;\ y=\alpha \sin {\frac {s}{\alpha }}\ .} それから:
x 2 + y 2 = α 2 , {\displaystyle x^{2}+y^{2}=\alpha ^{2}\ ,} これは原点を半径α で囲む円軌道として認識できます 。位置 s = 0 は [ α , 0]、つまり3時の方向に対応します。上記の形式を用いるには、導関数が必要です。
y ′ ( s ) = cos s α ; x ′ ( s ) = − sin s α , {\displaystyle y^{\prime }(s)=\cos {\frac {s}{\alpha }}\ ;\ x^{\prime }(s)=-\sin {\frac {s}{\alpha }}\ ,} y ′ ′ ( s ) = − 1 α sin s α ; x ′ ′ ( s ) = − 1 α cos s α . {\displaystyle y^{\prime \prime }(s)=-{\frac {1}{\alpha }}\sin {\frac {s}{\alpha }}\ ;\ x^{\prime \prime }(s)=-{\frac {1}{\alpha }}\cos {\frac {s}{\alpha }}\ .} これらの結果から、次のことが確認できます。
x ′ ( s ) 2 + y ′ ( s ) 2 = 1 ; 1 ρ = y ′ ′ ( s ) x ′ ( s ) − y ′ ( s ) x ′ ′ ( s ) = 1 α . {\displaystyle x^{\prime }(s)^{2}+y^{\prime }(s)^{2}=1\ ;\ {\frac {1}{\rho }}=y^{\prime \prime }(s)x^{\prime }(s)-y^{\prime }(s)x^{\prime \prime }(s)={\frac {1}{\alpha }}\ .} 単位ベクトルも次のように求められます。
u t ( s ) = [ − sin s α , cos s α ] ; u n ( s ) = [ cos s α , sin s α ] , {\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]\ ;\ \mathbf {u} _{\mathrm {n} }(s)=\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]\ ,} これは、 s = 0が位置[ ρ , 0]にあり、 s = ρ π/2が位置[0, ρ ]にあることを示しています。これは、 x と y の元の式と一致しています 。言い換えれば、 s は円周を3時から反時計回りに測ったものです。また、これらのベクトルの微分は次のように求められます。
d d s u t ( s ) = − 1 α [ cos s α , sin s α ] = − 1 α u n ( s ) ; {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {t} }(s)=-{\frac {1}{\alpha }}\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]=-{\frac {1}{\alpha }}\mathbf {u} _{\mathrm {n} }(s)\ ;} d d s u n ( s ) = 1 α [ − sin s α , cos s α ] = 1 α u t ( s ) . {\displaystyle \ {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {n} }(s)={\frac {1}{\alpha }}\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]={\frac {1}{\alpha }}\mathbf {u} _{\mathrm {t} }(s)\ .} 速度と加速度を得るには、 s の時間依存性 が必要です。反時計回りの運動で速度 v ( t )が変化する場合は、次のようになります。
s ( t ) = ∫ 0 t d t ′ v ( t ′ ) , {\displaystyle s(t)=\int _{0}^{t}\ dt^{\prime }\ v(t^{\prime })\ ,} ここで、 v ( t ) は速度、 t は時間、 s ( t = 0) = 0 です。
v = v ( t ) u t ( s ) , {\displaystyle \mathbf {v} =v(t)\mathbf {u} _{\mathrm {t} }(s)\ ,} a = d v d t u t ( s ) + v d d t u t ( s ) = d v d t u t ( s ) − v 1 α u n ( s ) d s d t {\displaystyle \mathbf {a} ={\frac {\mathrm {d} v}{\mathrm {d} t}}\mathbf {u} _{\mathrm {t} }(s)+v{\frac {\mathrm {d} }{\mathrm {d} t}}\mathbf {u} _{\mathrm {t} }(s)={\frac {\mathrm {d} v}{\mathrm {d} t}}\mathbf {u} _{\mathrm {t} }(s)-v{\frac {1}{\alpha }}\mathbf {u} _{\mathrm {n} }(s){\frac {\mathrm {d} s}{\mathrm {d} t}}} a = d v d t u t ( s ) − v 2 α u n ( s ) , {\displaystyle \mathbf {a} ={\frac {\mathrm {d} v}{\mathrm {d} t}}\mathbf {u} _{\mathrm {t} }(s)-{\frac {v^{2}}{\alpha }}\mathbf {u} _{\mathrm {n} }(s)\ ,} ここで、α = ρ であることは既に証明されている。この加速度は、非一様円運動 における標準的な結果である 。
参照
注釈と参考文献 ^ クレイグ、ジョン(1849年)『英語の新たな普遍的語源・技術・発音辞典:芸術、科学、文学で使われるすべての用語を網羅』第1巻、ハーバード大学、291頁。 291ページの抜粋 ^ ブラッケンリッジ、ジョン・ブルース(1996年)『ニュートン力学の鍵:ケプラー問題とプリンキピア』カリフォルニア大学出版局、p.74、 ISBN 978-0-520-91685-2 。 ^ ニュートン、アイザック (2010). 『プリンキピア:自然哲学の数学的原理』 . [Sl]: スノーボール出版. p. 10. ISBN 978-1-60796-240-3 。 ^ Russelkl C Hibbeler (2009). 「運動方程式:法線座標と接線座標」. 工学力学:動力学 (第12版). Prentice Hall. p. 131. ISBN 978-0-13-607791-6 。 ^ ポール・アレン・ティプラー、ジーン・モスカ(2003年)『科学者とエンジニアのための物理学』(第5版)マクミラン社、129ページ 。ISBN 978-0-7167-8339-8 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2020年 11月4日 閲覧。 ^ P. Germain、M. Piau、D. Caillerie編 (2012). 理論・応用力学. エルゼビア. p. 194. ISBN 9780444600202 。 ^ 「求心力について知っておくべきこと」 ThoughtCo . 2024年 10月7日 閲覧 。 ^ クリス・カーター (2001). 『Aレベルのための物理学の事実と実践』 S.2.: オックスフォード大学出版局. p. 30. ISBN 978-0-19-914768-7 。 {{cite book }}: CS1 maint: location (link )^ ab OpenStax CNX. 「Uniform Circular Motion」. 2024年10月7日時点のオリジナルよりアーカイブ 。 2020年 12月25日 閲覧。 ^ Eugene Lommel; George William Myers (1900). Experimental physics. K. Paul, Trench, Trübner & Co. p. 63. 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ Colwell, Catharine H. 「求心加速度の公式の導出」 PhysicsLAB . 2011年8月15日時点のオリジナルよりアーカイブ。 2011年 7月31日 閲覧 。 ^ コンテ, マリオ; マッケイ, ウィリアム W (1991). 粒子加速器の物理学入門. ワールド・サイエンティフィック. p. 8. ISBN 978-981-4518-00-0 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2020年 5月18日 閲覧。 8ページの抜粋 2024年10月7日 Wayback Machineにアーカイブ ^ テオ・クーペリス (2010). 『宇宙の探求』(第6版). ジョーンズ&バートレット・ラーニング. p. 83. ISBN 978-0-7637-6858-4 。 ^ AV Durrant (1996). 物理学と工学におけるベクトル. CRC Press. p. 103. ISBN 978-0-412-62710-1 。 ^ ローレンス・S・ラーナー(1997年)『科学者とエンジニアのための物理学』ボストン:ジョーンズ&バートレット出版社、128頁 。ISBN 978-0-86720-479-7 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ アーサー・ベイザー (2004). シャウムの応用物理学概説. ニューヨーク: マグロウヒル・プロフェッショナル. p. 103. ISBN 978-0-07-142611-4 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ アラン・ダービーシャー (2003). 機械工学:BTEC国家オプション単位. オックスフォード:ニューネス. p. 56. ISBN 978-0-7506-5761-7 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ 連邦航空局 (2007). パイロットの航空知識百科事典. オクラホマシティ OK: Skyhorse Publishing Inc. 図3–21. ISBN 978-1-60239-034-8 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ 注: 定数である直交座標単位ベクトル およびとは異なり 、 極座標 では単位ベクトル u r と u θ の方向はθ に依存する ため、一般に時間微分はゼロではありません。 i ^ {\displaystyle {\hat {\mathbf {i} }}} j ^ {\displaystyle {\hat {\mathbf {j} }}} ^ 極座標系は粒子と共に動きますが、観測者は動きません。粒子の運動の記述は、静止した観測者の視点からの記述のままです。 ^ この局所座標系は自律的ではないことに注意してください。例えば、時間における回転は粒子の軌跡によって決まります。ラジアルベクトル r ( t ) は、軌跡の 曲率半径 を表すものではありません。 ^ ジョン・ロバート・テイラー (2005). 古典力学. カリフォルニア州サウサリート: University Science Books. pp. 28– 29. ISBN 978-1-891389-22-1 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2020年 11月4日 閲覧。 ^ コルネリウス・ランチョス (1986). 『力学の変分原理』 ニューヨーク: クーリエ・ドーバー出版. p. 103. ISBN 978-0-486-65067-8 。 ^ 例えば、 Howard D. Curtis (2005). Orbital Mechanics for Engineering Students . Butterworth-Heinemann. p. 5. ISBNを参照。 978-0-7506-6169-0 。 ^ SY Lee (2004). 加速器物理学(第2版). ハッケンサック, ニュージャージー州: ワールドサイエンティフィック. p. 37. ISBN 978-981-256-182-4 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ 曲線に沿った運動を 観測する者 は 、これらの局所座標を用いて、観測者の参照系 、つまり静止した視点から運動を記述している。言い換えれば、局所座標系は粒子と共に移動するが、観測者は移動しない。観測者が用いる座標系の変化は、 観測の記述 における変化に過ぎず、観測者の運動状態の変化を意味するものではない。また、 その逆も同様である 。 ^ Zhilin Li; Kazufumi Ito (2006). はめ込み界面法:界面と不規則領域を含む偏微分方程式の数値解.フィラデルフィア:応用数学協会.p. 16. ISBN 978-0-89871-609-2 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ KL Kumar (2003). 工学力学. ニューデリー: Tata McGraw-Hill. p. 339. ISBN 978-0-07-049473-2 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ Lakshmana C. Rao; J. Lakshminarasimhan; Raju Sethuraman; SM Sivakuma (2004). エンジニアリングダイナミクス:静力学と動力学. Prentice Hall of India. p. 133. ISBN 978-81-203-2189-2 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ 森田成之 (2001). 微分形式の幾何学 . アメリカ数学会. p. 1. ISBN 978-0-8218-1045-3 . ローカル座標。 ^ 曲線上の任意の点 P における接触円とは、 P と、 Pの両側にある 曲線上の他の2点 Q と R を通る円列の極限円であり、 Q と R が Pに近づくにつれて、 Q と R が P に近づく につれて、 Q と R が P を通る円列の極限円 である。Lamb著のオンラインテキストを参照: Horace Lamb (1897). An Elementary Course of Infinitesimal Calculus. University Press. p. 406. ISBN 978-1-108-00534-0 . 接触円。 ^ ab Guang Chen; Fook Fah Yap (2003). 『平面ダイナミクス入門(第3版)』Central Learning Asia/Thomson Learning Asia. p. 34. ISBN 978-981-243-568-2 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ R. ダグラス・グレゴリー (2006). 『古典力学:学部生向けテキスト』ケンブリッジ大学出版局. p. 20. ISBN 978-0-521-82678-5 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ エドマンド・テイラー・ウィテカー 、 ウィリアム・マクリー (1988). 『粒子と剛体の解析的ダイナミクスに関する論文:三体問題への序論』 (第4版)ケンブリッジ大学出版局. p. 20. ISBN 978-0-521-35883-5 。 ^ ジェリー・H・ギンズバーグ(2007年)『エンジニアリングダイナミクス』ケンブリッジ大学出版局、33ページ 。ISBN 978-0-521-88303-0 。 ^ Joseph F. Shelley (1990). 『エンジニアのためのベクトル力学800問解答:動力学』 McGraw-Hill Professional. p. 47. ISBN 978-0-07-056687-3 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ ラリー・C・アンドリュース、ロナルド・L・フィリップス (2003). エンジニアと科学者のための数学的手法. SPIE Press. p. 164. ISBN 978-0-8194-4506-3 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。 ^ Ch V Ramana Murthy; NC Srinivas (2001). 応用数学. ニューデリー: S. Chand & Co. p. 337. ISBN 978-81-219-2082-7 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2020年 11月4日 閲覧。 ^ 曲率 に関する記事では、 曲線が弧の長さ s ではなく任意の変数 ( t で表記) によってパラメータ化される、より一般的なケースを扱っています。 ^ Ahmed A. Shabana、Khaled E. Zaazaa、Hiroyuki Sugiyama (2007). 鉄道車両ダイナミクス:計算的アプローチ. CRC Press. p. 91. ISBN 978-1-4200-4581-9 . 2024年10月7日時点のオリジナルよりアーカイブ 。 2021年 3月30日 閲覧。
さらに読む サーウェイ、レイモンド・A.; ジューエット、ジョン・W. (2004). 『科学者とエンジニアのための物理学』(第6版). ブルックス/コール. ISBN 978-0-534-40842-8 。 ティプラー、ポール(2004年)『 科学者とエンジニアのための物理学:力学、振動と波動、熱力学』 (第5版)WHフリーマン、 ISBN 978-0-7167-0809-4 。 オスウェゴ市学区のオンラインリージェント試験物理学チュートリアルより、求心力と遠心力
外部リンク 無料辞書のウィクショナリーで 「centripetal」 を調べてください。
ジョージア州立大学の物理学と天文学のハイパーフィジックスからのノート





































![{\displaystyle \mathbf {a} \ {\stackrel {\mathrm {def} }{=}}\ {\frac {\mathrm {d} \mathbf {v} }{d\mathrm {t} }}=\mathbf {\Omega } \times {\frac {\mathrm {d} \mathbf {r} (t)}{\mathrm {d} t}}=\mathbf {\オメガ } \times \left[\mathbf {\オメガ } \times \mathbf {r} (t)\right]\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/55bdc59db211dba1e224034884d244146c97c2ba)

























![{\displaystyle {\begin{aligned}\mathbf {a} &={\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}\mathbf {u} _{\rho }+2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}\mathbf {u} _{\theta }{\frac {\mathrm {d} \theta }{\mathrm {d} t}}-\rho \mathbf {u} _{\rho }\left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}+\rho \mathbf {u} _{\theta }{\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\ ,\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} ^{2}\rho }{\mathrm {d} t^{2}}}-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{\theta }\left[2{\frac {\mathrm {d} \rho }{\mathrm {d} t}}{\frac {\mathrm {d} \theta }{\mathrm {d} t}}+\rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]\\&=\mathbf {u} _{\rho }\left[{\frac {\mathrm {d} v_{\rho }}{\mathrm {d} t}}-{\frac {v_{\theta }^{2}}{\rho }}\right]+\mathbf {u} _{\theta }\left[{\frac {2}{\rho }}v_{\rho }v_{\theta }+\rho {\frac {\mathrm {d} }{\mathrm {d} t}}{\frac {v_{\theta }}{\rho }}\right]\,.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4bd23fad91b9a145bc62e918b5124ee62c4a537b)
![{\displaystyle \mathbf {a} =\mathbf {u} _{\rho }\left[-\rho \left({\frac {\mathrm {d} \theta }{\mathrm {d} t}}\right)^{2}\right]+\mathbf {u} _{\theta }\left[\rho {\frac {\mathrm {d} ^{2}\theta }{\mathrm {d} t^{2}}}\right]=\mathbf {u} _{\rho }\left[-{\frac {v^{2}}{r}}\right]+\mathbf {u} _{\theta }\left[{\frac {\mathrm {d} v}{\mathrm {d} t}}\right]\ }](https://wikimedia.org/api/rest_v1/media/math/render/svg/df2f314be17d32d8d204bef757376219863181c7)











![{\displaystyle \mathbf {r} (s)=\left[x(s),\ y(s)\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ea9cb4aedaa6696cd195a0329b20a3a6d4c1f0d0)
![{\displaystyle \mathrm {d} \mathbf {r} (s)=\left[\mathrm {d} x(s),\ \mathrm {d} y(s)\right]=\left[x'(s),\ y'(s)\right]\mathrm {d} s\ ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e41305b24920b77bceb3d266edba4ab08249618)
![{\displaystyle \left[x'(s)^{2}+y'(s)^{2}\right]=1\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50c42e82eda34ce15d98149c930dfb7ba7cec77d)
![{\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[x'(s),\ y'(s)\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a7fe41893b23da5d10fa21095cbf823374b339)
![{\displaystyle \mathbf {u} _{\mathrm {n} }(s)=\left[y'(s),\ -x'(s)\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aefd42926b0e6c5fd1cdd0b91ae514b65fd3dfc0)







![{\displaystyle {\begin{aligned}\mathbf {a} (s)&={\frac {\mathrm {d} }{\mathrm {d} t}}\mathrm {v} (s)={\frac {\mathrm {d} }{\mathrm {d} t}}\left[{\frac {\mathrm {d} s}{\mathrm {d} t}}\left(x'(s),\ y'(s)\right)\right]\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)+\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}\left(x''(s),\ y''(s)\right)\\&=\left({\frac {\mathrm {d} ^{2}s}{\mathrm {d} t^{2}}}\right)\mathbf {u} _{\mathrm {t} }(s)-\left({\frac {\mathrm {d} s}{\mathrm {d} t}}\right)^{2}{\frac {1}{\rho }}\mathbf {u} _{\mathrm {n} }(s)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5b63aca630aacb31a8ef0fc21bcf2f8e86af3ca)





![{\displaystyle \mathbf {u} _{\mathrm {t} }(s)=\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]\ ;\ \mathbf {u} _{\mathrm {n} }(s)=\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]\ ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72b1a6646bfe5026f496df581576f09251db1a9c)
![{\displaystyle {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {t} }(s)=-{\frac {1}{\alpha }}\left[\cos {\frac {s}{\alpha }}\ ,\ \sin {\frac {s}{\alpha }}\right]=-{\frac {1}{\alpha }}\mathbf {u} _{\mathrm {n} }(s)\ ;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d6d3efccbed76c27507654645897ccc0b587b08)
![{\displaystyle \ {\frac {\mathrm {d} }{\mathrm {d} s}}\mathbf {u} _{\mathrm {n} }(s)={\frac {1}{\alpha }}\left[-\sin {\frac {s}{\alpha }}\ ,\ \cos {\frac {s}{\alpha }}\right]={\frac {1}{\alpha }}\mathbf {u} _{\mathrm {t} }(s)\ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/29f755d9d1bb8f6f884a3bdc8ae8d1be5147674a)




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}